
دانلود شبیه سازی مقاله مدل دینامیکی ماشین رلوکتانسی دو سو تغذیه بدون جاروبک
| عنوان فارسی |
یک مطالعه مدلسازی و شبیه سازی برای مدل دینامیکی ماشین رلوکتانسی دو سو تغذیه بدون جاروبک با استفاده از سیمولینک متلب |
| عنوان انگلیسی |
Modeling and Simulation Study for Dynamic Model of Brushless Doubly Fed Reluctance Machine Using Matlab Simulink |
| کلمات کلیدی |
BDFRM؛ مدلسازی دینامیکی؛ شبیه سازی |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد صفحات انگلیسی : 5 | نشریه : IEEE |
| سال انتشار : 2015 | تعداد رفرنس مقاله : 9 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : International Conference on Artificial Intelligence, Modelling and Simulation (AIMS) (کنفرانس بین المللی هوش مصنوعی، مدل سازی و شبیه سازی) |
| ترجمه: ندارد | گزارشکار : دارد (فایل راهنمای 6 صفحه ای که به توضیحاتی در مورد شبیه سازی پرداخته است) | شبیه سازی : دارد (یک فایل سیمولینک با فرمت .slx و یک فایل با فرمت .m) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
ماشین رلوکتانسی دو سو تغذیه
ماشین القایی، یک دستگاه بسیار کاربردی است، چون دارای یک ساختار ساده بدون جاروبک می باشد، بنابراین، این ماشین ها از نظر ساخت و نگهداری، کم هزینه اند. آنها می توانند به عنوان ماشین های با سرعت متغیر از طریق استفاده از اینورترهای الکترونیک قدرت با فرکانس متغیر، فعالیت کنند و نظریه های کنترلی، مانند کنترل جریان محور، توسعه یافته اند. اما همچنین تعدادی معایب برای آنها وجود دارد، کنترل سرعت، پیچیده است، زیرا دارای خصوصیات غیر خطی با تداخل متقابل در بین پارامترهای این ماشین ها است. این، بدان معناست که سرعت دستگاه در مقایسه با، به عنوان مثال، ماشین DC به راحتی قابل کنترل نیست. بنابراین باعث می شود در مقایسه با ماشین DC، هزینه کنترلر، بالاتر باشد. نقطه ضعف دیگر این ماشین در صورت شروع برخط آن، جریان استارت بالای آن است. این جریان ممکن است پنج تا هشت برابر بیشتر از جریان بار کامل باشد. این جریان می تواند با استفاده از یک اینورتر فرکانس متغیر، کاهش یابد. همچنین این ماشین هنگام بارگذاری آرام دستگاه، ضریب توان تاخیر کم تری دارد. این امر باعث می شود که سیستم اینورتر به دلیل جریان های مورد نیاز بیشتر، بزرگ تر باشد؛ این ماشین، دارای امتیاز kVA بزرگ است. اگر اینورتر از لحاظ اندازه، کاهش یابد، این یک مزیت خواهد بود. در سال های اخیر، ماشین رلوکتانسی دو سو تغذیه بدون جاروبک (BDFRM) تحت بررسی قرار گرفته است. BDFRM، یکی از اعضای خانواده ماشین های بازیابی انرژی لغزشی است که برای طیف گسترده ای از کاربردها مناسب است. این ماشین می تواند در چندین مد مختلف کار کند، اما یک مد به عنوان ماشین انرژی لغزشی، شبیه به ماشین القای دوسو تغذیه (DFIM) است که اکنون در توربین های بادی بسیار رایج است. با این حال، BDFRM برای تعداد قطب داده شده در فرکانس بالاتر نسبت به موتور القایی عمل می کند. کار با فرکانس بالاتر به معنای این است که آن ماشین، راندمان بالاتر، چگالی توان بالاتر، اندازه کوچک تر و هزینه کم تر دارد. BDFRM همچنین دارای یک ساختار بدون جاروبک است که مزیت آن نسبت به DFIM می باشد. این ترکیب، چشم انداز یک ماشین محکم، قابل کنترل و با هزینه نگهداری پایین را ایجاد می کند. BDFRM، دارای دو مجموعه سیم پیچ 3 فازی در استاتور است. یکی مستقیماً به شبکه وصل می شود که سیم پیچ اولیه یا سیم پیچ قدرت نامیده می شود و دیگری از طریق اینورتر دوجهته به شبکه وصل می شود که به آن سیم پیچ ثانویه یا سیم پیچ کنترل گفته می شود. این ماشین از طریق کنترل اینورتر دوجهته کنترل می شود. از آنجا که BDFRM فقط به یک اینورتر نامی جزئی احتیاج دارد، می توان هزینه سیستم درایو را کاهش داد؛ و ماهیت بدون جاروبک بودن این ماشین، قابلیت اطمینان آن را افزایش می دهد. این امر به ویژه در کاربردهای انرژی بزرگ، مانند توربین های بادی و پمپ های بزرگ، مفید است. از این رو، روش های مختلف کنترل برای BDFRM مورد بررسی قرار گرفته است. تحلیل شبیه سازی رایانه ای، یکی از بهترین روش های آزمون گیری برای بررسی و نشان دادن عملکرد یک نظریه پیشنهادی جدید قبل از نمونه سازی تجربی است. با استفاده از یک ابزار شبیه سازی رایانه ای می توان عملکرد را با کنترل های موجود مقایسه کرد و بهبود هر عملکرد بالقوه ای را ارزیابی نمود. به منظور به دست آوردن نتایج شبیه سازی دقیق برای روش های کنترل پیشنهادی برای BDFRM، استفاده از یک مدل شبیه سازی ماشین دقیق، بسیار مهم است. تعداد زیادی ابزار شبیه سازی رایانه ای در دسترس است، اما محبوب ترین ابزار شبیه سازی رایانه ای، Matlab/Simulink است. در این پروژه، یک شبیه سازی پویا از یک مدل BDFRM با استفاده از Matlab/Simulink ساخته شده است. این مدل شبیه سازی پویا برای استفاده در مطالعات شبیه سازی بیشتر BDFRM در دسترس است.
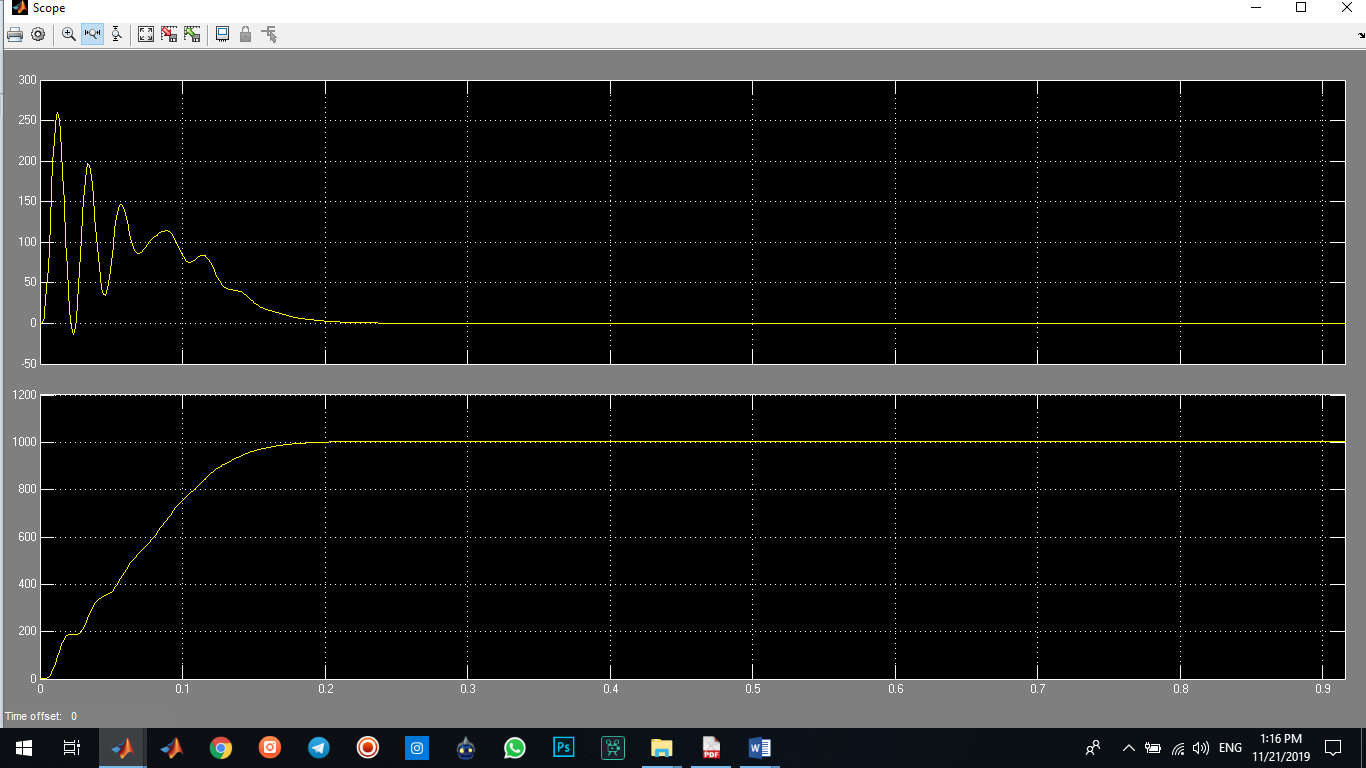
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تصویر مربوط به خروجی آن قرار داده شده است:


نماد اعتماد الکترونیکی

لوگو طلایی
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.