
دانلود شبیه سازی مقاله روش های کنترلی جهت درایو موتور dc بدون جاروبک آهنربای دائم
| عنوان فارسی |
مطالعه ای بر روش های کنترلی مختلف جهت درایو موتور dc بدون جاروبک آهنربای دائم |
| عنوان انگلیسی |
Review of different control topologies for the permanent magnet brushless dc motor drives |
| کلمات کلیدی |
ماشین های آهنربای دائم؛ ماشین های بدون جاروبک؛ PMBLDCM و کنترل بدون حسگر؛ کنترل کننده های کم هزینه |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد صفحات انگلیسی : 5 | نشریه : Semantic Scholar |
| سال انتشار : 2012 | تعداد رفرنس مقاله : 23 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : International Journal of Advanced Engineering Research and Studies (مجله بین المللی مطالعات و تحقیقات در زمینه مهندسی پیشرفته) |
| ترجمه: ندارد | گزارشکار : دارد (توضیحات مختصر 2 صفحه ای + فیلم نحوه ران کردن دو دقیقه ای) | شبیه سازی : دارد (فایل های شبیه سازی در سیمولینک متلب با فرمت .mdl) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
درایو موتور dc بدون جاروبک
موتورهای DC بدون جاروبک مغناطیس دائم (PMBLC) جدیدترین انتخاب محققان است که علت آن، بازده زیاد، عملکرد بی صدا، اندازه فشرده ، قابلیت اطمینان زیاد و نیاز کم به تعمیر و نگهداری آنها می باشد. این موتورها برای کاربردهای متعدد ترجیح داده می شوند؛ اما اکثر آنها نیاز به کنترل بدون حسگر این موتورها دارند. عملکرد موتورهای PMBLC نیاز به سنجش موقعیت روتور برای کنترل جریان های سیم پیچی دارند. کنترل بدون حسگر نیاز به برآورد موقعیت روتور از سیگنال های ولتاژ و جریان، که به آسانی سنجش می شوند، دارد. این پروژه، درایوهای موتور PMBLC نوین با کنترل بدون حسگر این موتورها را ارائه می دهد.
توضیحات کلی و جامع درایوهای PMBLDCM ارائه داده شده تا دیدگاهی شفاف در مورد جنبه های مختلف این درایوها حاصل گردد. درایوهای PMBLDCM برای کاربردهای بسیاری مناسب هستند؛ اما، انتخاب موتور (یعنی پیکربندی روتور)، طرح کنترلی (یعنی، بدون حسگر یا با حسگر) و توپولوژی کنترلر به دقت، هزینه، پیچیدگی و قابلیت اطمینان سیستم بستگی دارد. یک مشتری می تواند یک درایو PMBLDCM را با ویژگی های مطلوبش انتخاب کند، اما یک تعادل و توازن بین تعداد پارامترها (برای مثال، بدون حسگر یا با حسگر، دقت، پیچیدگی، قابلیت اطمینان و هزینه کنترلر) وجود دارد. عملکرد درایو PMBLDCM با توپولوژی PFC بوست از نظر ریپل های گشتاور کم، تغییرات هموار سرعت و ضریب توان واحد در دو سر AC، بهبود می یابد.
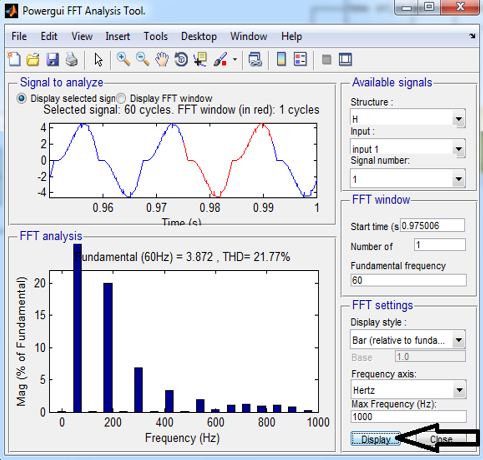
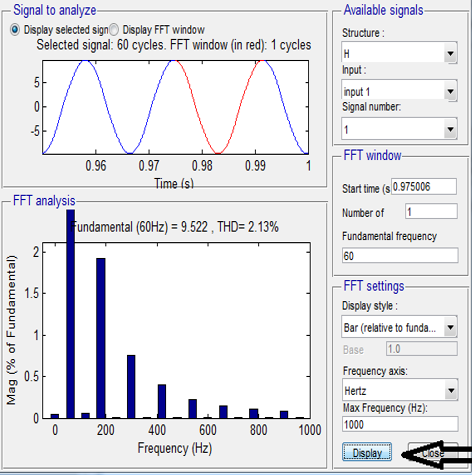
در این شبیه سازی به بررسی کنترل موتور dc بدون جاروبک آهنربای دائم پرداخته شده است. توضیحات کامل در زمینه نحوه پیاده سازی این شبیه سازی در قالب یک فایل ورد (WORD) ارائه شده است. در ادامه نیز برخی از نتایج خروجی و محیط شبیه سازی در نرم افزار متلب (MATLAB) نشان داده شده است:



نماد اعتماد الکترونیکی

لوگو طلایی
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.