
دانلود شبیه سازی مقاله کنترلر PID و تنظیم سیستم ضدباد با بهینه سازی کلونی مورچه
| عنوان فارسی |
کنترل کننده های PID و تنظیم سیستم های ضدباد با استفاده از بهینه سازی کلونی مورچه |
| عنوان انگلیسی |
PID controllers and anti-windup systems tuning using ant colony optimization |
| کلمات کلیدی |
بهینه سازی؛ کنترل حرکت؛ میرایی اکتیو؛ تنظیم خودکار؛ ماشین DC؛ کنترل غیرخطی |
| درسهای مرتبط |
کنترل؛ الگوریتم های بهینه سازی |
| تعداد صفحات انگلیسی : 10 | نشریه : Semantic Scholar |
| سال انتشار : 2013 | تعداد رفرنس مقاله : 9 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : European Conference on Power Electronics and Applications (EPE) (کنفرانس اروپایی الکترونیک قدرت و کاربردها) |
| ترجمه: ندارد | گزارشکار : ندارد | شبیه سازی : دارد (فایل های شبیه سازی در نرم افزار متلب با فرمت .m و .mdl) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
پروژه متلب در زمینه کنترل کننده PID
بهینه سازی کلونی مورچه ها، تنظیم همزمان تعداد زیادی از پارامترهای کنترل و انعطاف پذیری در انتخاب معیار عملکرد را امکانپذیر می کند. یک روش تنظیم برون خطی برای کنترلکنندههای نوع PID و زیرسیستم ضد تجمع مرتبط با آنها برای ساختارهای کنترل حلقه آبشاری ارائه شدهاست. همچنین در این مطالعه، بینش ها و ادراکات مربوط به فرآیند طراحی، تنظیم پارامتر و مدیریت محدودیت های نرم و سخت نیز مطرح شده است. این روش با تنظیم یک کنترل کننده PID وزنی و مدیریت اشباع در رابطه با یک محور موقعیت یابی در یک برنامه خردکن نشان شده است.
تنظیم کنترلکننده در سیستمهای غیرخطی برای دستیابی به پاسخ رضایتبخش در زمینه ورودیهای نقطه تنظیم، اختلالات و همچنین توجه به محدودیتهای سیستم و محدودیتهای اعمالشده توسط برنامه، کار پیچیده ای محسوب می شود. روش ACO از این مزیت برخوردار است که می تواند به طور همزمان تعداد زیادی پارامتر را تنظیم کند، اما در عین حال از یک معیار عملکرد متناسب با برنامه نیز استفاده می کند. همچنین، با انتخاب صحیح وزن های نسبی در معیار عملکرد، می توان محدودیت های سخت یا نرم را اعمال نمود. همچنین تعداد مورچه ها و تکرارها برای ACO بایستی به دقت انتخاب شود تا راه حل از لحاظ آماری با توجه به تعداد پارامترهای خروجی و کمیت آنها ارزشمند باشد. یافته های بدست آمده حاکی از آن است که کنترل کننده وزنی، نیاز به سازش هایی که بایستی بین پاسخ نقطه تنظیم و رفع اختلال ایجاد شود را به صورت قابل ملاحظه ای کاهش می دهد. از اینرو، این روش را می توان برای تنظیم سیستم های صنعتی که در رابطه با آن مدل معقولی محسوب می شود، اعمال نمود. اما در اینجا ممکن است زمان شبیهسازی به یک مسئله جدی تبدیل شود، از اینرو، ما مطالعاتی را برای توسعه یک الگوریتم ترکیبی در پیش گرفته ایم که ACO را برای جستجوی سراسری و الگوریتم نلدر- مید را برای تنظیم دقیق کنترل کننده ترکیب میکند.
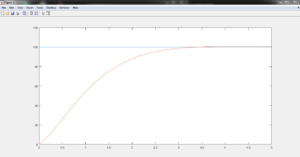
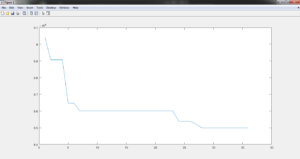
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تصاویر مربوط به خروجی های شبیه سازی قرار داده شده است:




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.